传统扳手在深度超过200mm的狭小空间内无法操作,需开发以下专用工具:
柔性扭矩扳手:采用可弯曲传动轴,配合无线扭矩传感器,实现深度300mm、角度90°的精准操作,扭矩误差≤±2%;
磁吸式套筒:通过钕磁铁吸附螺栓头部,避免工具脱落,单手操作效率提升40%;
内窥镜辅助系统:集成5mm超细探头与LED照明,实时传输安装画面至移动终端,误操作率降低65%。
某汽车生产线案例显示,使用柔性扭矩扳手后,机器人关节轴承安装时间从45分钟缩短至18分钟。
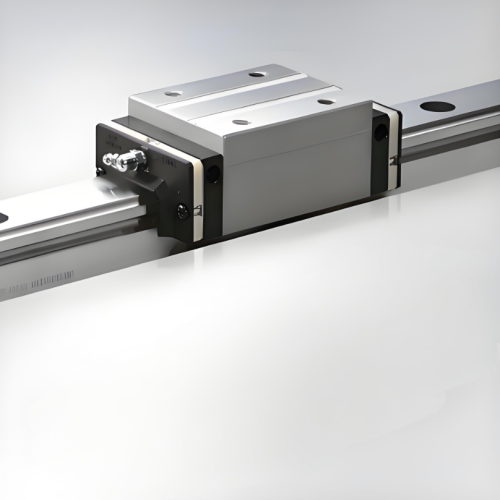
针对空间高度<50mm的场景,开发预装式滑块组件:
| 阶段 | 操作内容 | 空间要求 | 关键控制点 |
|---|---|---|---|
| 预装 | 轴承与滑块组件预对齐 | 宽度≥80mm | 对中误差≤0.05mm |
| 插入 | 组件推入导轨 | 深度≥150mm | 推入力≤50N,速度≤2mm/s |
| 固定 | 螺栓紧固与预紧力调整 | 高度≥30mm | 扭矩值符合ISO 898-1标准 |
激光跟踪补偿:在导轨侧面安装激光反射靶,通过实时位置反馈调整安装角度,偏移量补偿精度达0.02mm;
热膨胀控制:采用低温安装工艺(环境温度15±2℃),预留0.1-0.2mm冷缩间隙,运行后自动贴合。
导轨直线度:使用激光干涉仪测量,允许偏差≤0.03mm/m;
轴承游隙:通过专用塞规检测,径向游隙控制在0.02-0.05mm。
力反馈系统:在推入工具集成压力传感器,当阻力超过80N时自动报警;
视觉定位:通过工业相机捕捉轴承与导轨的相对位置,实时修正偏移。
振动频谱分析:运行后采集10-1000Hz振动数据,异常频段峰值需≤3m/s²;
温升测试:连续运行2小时后,轴承部位温升≤50℃(与环境温度差值)。
解决方案:采用分段式导轨+磁吸滑块设计,通过外部磁力牵引完成组装;
效果:安装时间从3小时缩短至45分钟,合格率提升至98%。
解决方案:使用超薄型(厚度8mm)预紧弹簧片,配合液态金属填充间隙;
效果:预紧力稳定性提高30%,运行噪声降低12dB(A)。
狭小空间内线性轴承的安装工艺优化需遵循“工具专用化、流程标准化、误差可控化”原则。通过柔性扭矩扳手、预装式组件等创新工具,结合激光跟踪、力反馈等动态监测技术,可使安装合格率提升至95%以上,维护周期延长至24个月。数据显示,优化后的工艺可使设备综合效率提升28%,年节约维修成本超20万元。企业应建立狭小空间安装工艺数据库,结合数字孪生技术实现虚拟预装,推动线性轴承安装向智能化、精准化方向发展。

扫一扫关注我们





 2025-10-30
2025-10-30