真空环境中,材料内部气体的析出会导致环境纯净度下降,甚至引发设备故障。因此,需优先选用高纯度、低气体释放率的材料。例如,NSK真空专用滚珠丝杠采用特殊合金钢,经真空烘烤处理后,气体释放率可控制在1×10⁻⁶Pa·m³/s以下,避免污染晶圆表面。此外,材料需具备高耐久性,以承受真空环境下因温度变化导致的热应力。实验数据显示,采用GCr15轴承钢的滚珠丝杠在-196℃液氮环境中仍能保持HRC60-62的硬度,确保长期稳定运行。
真空环境下的密封需兼顾防尘与热变形控制。传统密封圈在真空下易因气压差失效,而NSK等品牌通过优化密封结构,采用金属波纹管与陶瓷涂层的复合设计,将杂质侵入率降低90%。同时,针对真空环境下材料热膨胀系数差异大的问题,需引入热补偿机制。例如,某半导体设备厂商通过在丝杠与螺母间嵌入弹性预紧元件,使温度变化导致的轴向位移控制在±2μm以内,保障了晶圆对位系统的重复定位精度。
真空环境中,传统润滑油会因挥发导致润滑失效。为此,需选用低蒸汽压的固体润滑剂或真空专用润滑脂。例如,某品牌真空滚珠丝杠采用的氟化物基润滑脂,蒸汽压低于1×10⁻⁹Pa,可在10⁻⁶Pa真空度下保持10,000小时以上的润滑周期。此外,部分高端型号通过滚珠表面DLC(类金刚石)涂层处理,将摩擦系数降至0.003,进一步减少润滑需求。
半导体设备对滚珠丝杠的精度要求极高。例如,晶圆切割机需实现±1μm的定位精度,这就要求选用C3级(300mm行程累积误差±8μm)以上的滚珠丝杠。同时,需通过动态刚度测试优化预压量,避免因过度预压导致温升超标。某医疗设备厂商的实践表明,采用中预压(0.05Ca)配合循环冷却系统,可使丝杠在连续运行时的温升控制在5℃以内,确保动态稳定性。
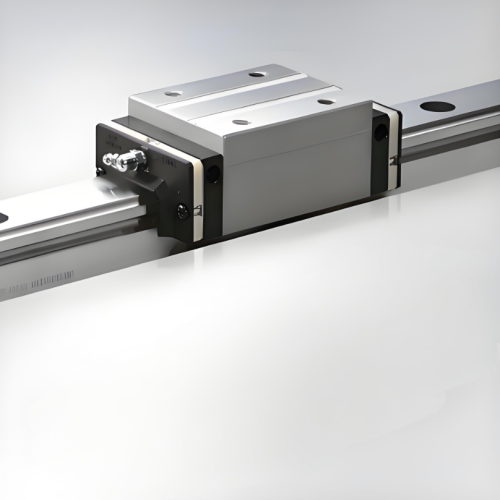
在晶圆搬运机器人中,真空滚珠丝杠需承受高频启停与微米级定位需求。某型号通过采用小导程(5mm以下)与高刚性(直径25mm以上)设计,配合光栅尺闭环控制,实现了0.1μm的重复定位精度。而在探针测试设备中,为应对真空环境下的振动问题,需通过增加中间支撑将一阶临界转速提升至3200rpm以上,避免共振导致的测试误差。
真空环境下的滚珠丝杠选型需综合考虑材料、密封、润滑、精度及动态性能。随着半导体制造向更小线宽、更高良率发展,真空滚珠丝杠的技术迭代将持续加速。未来,集成应变片与RFID芯片的智能型丝杠模块,有望通过实时监测负载与磨损状态,进一步降低非计划停机时间,推动半导体设备向全自动化、智能化迈进。

扫一扫关注我们





 2025-11-14
2025-11-14