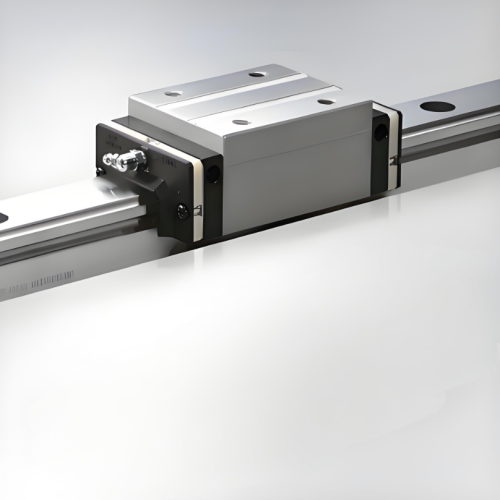
交叉滚子导轨的单轴应用已形成成熟体系。其核心结构由V型滚道导轨、滚子保持架及交错排列的圆柱滚子组成,通过滚子在90度V型槽内的滚动实现直线运动。这种设计使导轨具备四向载荷承载能力,可同时承受径向、反径向及侧向力矩,且接触面积较传统滚珠导轨扩大3倍以上,单位面积压强降低60%,显著提升了抗变形能力。例如,在数控机床的X/Y/Z轴运动系统中,交叉滚子导轨通过精密磨削与热处理工艺,将直线度误差控制在0.002mm/m以内,支撑起刀具或工件的高速、高精度定位。
当运动需求从单轴扩展至多轴复合时,交叉滚子导轨的模块化设计优势凸显。通过组合多组导轨,可构建二维平面(XY轴)或三维空间(XYZ轴)的运动系统,实现多自由度协同控制。例如,在半导体制造的晶圆检测设备中,交叉滚子导轨组成的XY轴平台需同时满足0.1微米的定位精度与每秒2米的运动速度。其交叉滚子排列结构使导轨在承受垂直载荷的同时,通过预紧力调控系统自动补偿安装面误差,确保多轴运动的同步性,将重复定位误差控制在±0.05微米以内。
在医疗CT机的检查床运动系统中,交叉滚子导轨的三维复合运动能力更为关键。其Z轴(升降)与X轴(水平移动)导轨需协同工作,支撑床体承载500kg负载时实现0.01mm/m的直线度。通过优化滚子节距与保持架结构,导轨系统将动态摩擦系数降低至0.003,使床体在高速启停(加速度达3g)时仍保持平稳,避免振动干扰影像清晰度。
针对航空航天、工业机器人等极端工况,交叉滚子导轨通过结构创新进一步拓展多轴应用边界。例如,某型卫星姿态调整机构采用交叉滚子导轨构建六自由度运动平台,其不锈钢材质与真空兼容润滑技术,使导轨在-40℃至120℃温变及高真空环境下,仍能保持0.02mm的定位精度。而在工业机器人的关节部位,交叉滚子导轨与谐波减速器的集成设计,将多轴运动的回转精度提升至0.001度,支撑起机械臂的微米级操作。
从单轴线性运动到多轴复合控制,交叉滚子导轨正以“四向承载、零间隙运动、模块化组合”三大特性,重塑精密装备的运动控制体系。随着工业母机向纳米级精度迈进,以及航空航天、医疗设备对多自由度协同需求的增长,交叉滚子导轨的多轴应用技术将持续突破,成为高端装备制造的核心支撑。

扫一扫关注我们





 2025-11-26
2025-11-26