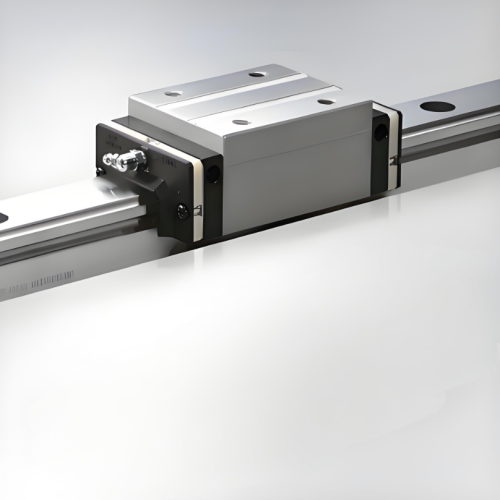
交叉滚子导轨采用双V型滚道与正交排列的圆柱滚子组合设计,形成多向承载结构。其核心优势在于:
高刚性承载:滚子与滚道接触面积较传统滚珠导轨提升30%以上,弹性变形量降低50%,在固晶机摆臂机构中可承受0.5N·m级倾覆力矩,确保晶片转移过程无偏移。
低摩擦运动:滚动摩擦系数低至0.002,较滑动导轨降低80%,配合预紧力调节技术,使点胶平台在0-30m/min速度范围内运动阻力波动小于2%,实现胶量控制精度±0.01mm。
紧凑化设计:导轨宽度较传统方案缩减40%,在固晶机紧凑型机架中可节省30%安装空间,同时保持100kg级负载能力,满足多工位同步作业需求。
在LED固晶机中,交叉滚子导轨支撑着取料臂、摆臂、固晶平台三大核心运动单元。以某型号12轴固晶机为例:
取料机构:采用V6系列导轨实现Z轴垂直运动,配合气缸驱动,在0.2秒内完成0.5mm芯片的吸取与释放,定位重复精度达±2μm。
摆臂机构:通过CRW系列防蠕动导轨实现180°旋转定位,结合视觉系统反馈,将晶片转移时间压缩至0.15秒,较传统方案效率提升40%。
固晶平台:双V12导轨构成XY平面运动系统,在伺服电机驱动下,实现200mm×200mm范围内5μm级定位,配合温度补偿算法,确保不同环境下的运动稳定性。
在精密点胶设备中,交叉滚子导轨的应用聚焦于胶量控制与运动平稳性优化:
胶阀定位系统:采用V9系列导轨支撑胶阀Z轴运动,通过预加载荷调节消除反向间隙,使点胶头在0.01mm级微距调整中保持零回差,满足Mini LED封装0.05mm胶宽要求。
平台运动机构:双V4导轨构建的XY平台,在直线电机驱动下实现1m/s高速运动,配合纳米级润滑脂,使运动加速度达2G时仍保持0.5μm级定位精度,有效解决高速点胶中的拖尾现象。
环境适应性设计:针对无尘车间需求,导轨采用锂基低挥发润滑脂,在-10℃至60℃温宽范围内保持稳定摩擦系数,确保点胶设备24小时连续运行的可靠性。
随着半导体封装向01005级微间距发展,交叉滚子导轨正朝着更高精度、更智能化方向演进。某企业最新推出的智能导轨系统,集成位移传感器与自诊断模块,可实时监测滚子磨损状态,预测性维护周期延长至2000小时,使固晶机综合效率(OEE)提升至92%以上。这种技术迭代不仅推动着设备制造商的产品升级,更重塑着整个精密制造产业链的价值分配格局。
从固晶机的晶片转移到位点,到点胶设备的胶量精准控制,交叉滚子导轨以其独特的技术优势,成为高端装备运动控制的核心部件。随着智能制造的深入推进,这项技术将持续赋能精密电子制造,助力中国从"制造大国"向"智造强国"跨越。

扫一扫关注我们





 2025-11-26
2025-11-26