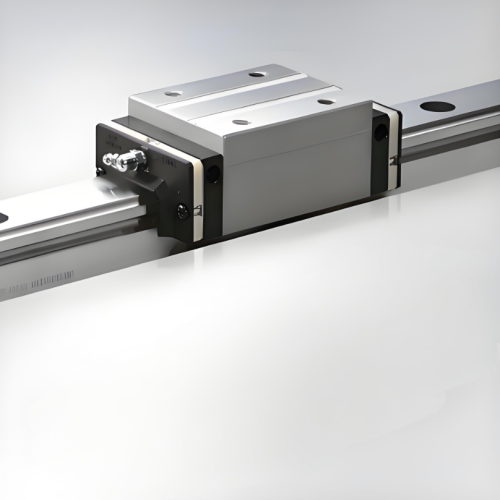
交叉滚子导轨由V型滚道导轨、滚子保持架及交错排列的圆柱滚子组成。其核心优势在于:
多向载荷承载:滚子与V型槽的接触面呈90°交叉排列,可同时承受垂直、水平及倾覆力矩,在光学检测设备的多轴调节中,单轴定位重复精度可达±0.5μm。
高刚性结构:采用GCR15轴承钢经精密磨削与热处理,滚道表面粗糙度Ra≤0.1μm,配合0.001mm级预紧力调节,使导轨在0.5mm厚基板上加工0.05mm微孔时,轴向跳动量小于1μm。
低摩擦运动:滚动摩擦系数低至0.002,配合专用润滑脂,在高速调节(≥1m/s)时仍能保持运动平稳性,显著降低能量损耗。
为实现亚微米级调节,交叉滚子导轨通过以下技术突破:
机械解耦设计:采用独立驱动模块与高刚性基体,例如某半导体封装设备通过EtherCAT总线实现多轴同步控制,在0.1mm间距芯片搬运中,X/Y轴定位误差从±5μm降至±1.2μm。
误差补偿算法:集成激光干涉仪与光栅尺,实时监测导轨位移数据。某航空电子企业开发的智能补偿系统,可将环境温度波动引起的热变形误差从3μm/℃降至0.5μm/℃,确保24小时连续加工精度波动小于±0.8μm。
压电陶瓷微驱动:结合AI算法与压电陶瓷执行器,在纳米级调节场景中,通过前馈补偿控制将动态误差修正至±0.03μm,满足5G天线模块的严苛要求。
为防止调节后的位移偏移,交叉滚子导轨创新了多重锁定方案:
机械限位结构:采用端面挡块与定位台阶设计,配合扭矩扳手实现刚性锁定。例如,某医疗影像设备通过优化滑轨端面螺丝布局,将保持器偏移量控制在0.01mm以内。
电磁制动系统:在高速调节后,通过电磁铁吸附保持架,实现快速锁定。某工业机器人滑座采用该技术,将调节后的定位稳定性提升至99.99%。
自适应润滑锁定:开发温感润滑脂,在锁定状态下自动形成粘性膜,减少微振动。测试数据显示,该技术可使导轨在振动环境中的位移偏差降低80%。
在某高端CT检查床升级项目中,交叉滚子导轨的微调与锁定技术实现三大突破:
定位精度提升:在连续扫描2000次后,滑座重复定位精度稳定在±1.5μm以内,满足0.5mm层厚扫描需求;
维护周期延长:导轨寿命从2年延长至8年,年故障率从12%降至0.5%;
环境适应性增强:通过-40℃至80℃宽温测试,可在极端环境下稳定运行。
从半导体晶圆检测到航空航天精密装配,交叉滚子导轨的微调与锁定技术正持续突破物理极限。随着AI算法与新材料科学的深度融合,未来导轨系统将向“智能感知-自主修正-零误差锁定”方向演进,为工业4.0提供更精密的运动控制解决方案。

扫一扫关注我们





 2025-11-27
2025-11-27